728x90
- https://essay.utwente.nl/103170/1/Six_Dijkstra_MA_ET.pdf
- power reward + CRAH setpoint reward, serer outlet temperature penalty + action fluctuation penalty = reward
Reward function
$$r_{t_{i}} = r_{P}(P_{t_{i}}^{HVAC}) \ + \ \lambda_{T_{SP}^{AL_{1}}} \cdot r_{T}(T_{t_{i}}^{AL_{1}}) + \lambda_{T_{constr}^{AL_{2}}} \ \cdot \ p_{T}(T_{t_{i}}^{AL_{2}}) + \lambda_{a} \ \cdot \ p_{a}(\Delta a_{t_{i}}) $$
- $$r_{t_{i}}$$ : total reward at thime $t_i$
- $r_P$ : reward related to power. HVAC power at time $t_i$
- $\lambda_{T_{SP}^{AL1}}$ : scaling factor. related to the setpoint temperature of the CRAH
- $r_T$ : meeting temperature setpoint for the air leaving the CRAH at time $t_i$
- $\lambda_{T_{constr}^{AL2}}$ : scaling factor, penalty on violating the server outlet temperature constraint
- $p_T$ : penalty for violatin gserver outlet tmp, air temperature after the server at time $t_i$
- $\lambda_a$ : vector containing scaling factors, penalty on fluctuations of the each action
- $\Delta a_{t_i}$ : difference between action
- $p_a$ : vector of penaltieson fluctuations of the actions
- HVAC power reward
$$r_{P}(P_{t_{i}}^{HVAC}) = 1 - \frac{p_{t_{i}}^{HVAC}}{p_{max}^{HVAC}}$$
헉 놀랍게도 제가 한 방식이랑 거의 비슷하네요...
- CRAH setpoint reward
- leaving air temperature setpoint(Gaussian reward)
$$ r_{T} = e^{-\frac{1}{2}(\frac{T^{AL1}-T_{SP}^{AL1}}{\sigma_{SP}})^2}$$ - $\sigma_{SP}$ : 튜닝 가능한 파라미터
- $T^{AL1}$ : air temperature before server
- $T^{AL2}$ : air temperature after server

- leaving air temperature setpoint(Gaussian reward)

- 이쪽에서도 temperature로 인한 reward가 너무 커지지 않게 제한하는 방식을 사용함(TRPO처럼)
$$T^{AL2} \leq T_{constr}^{AL2}$$
RL Algorithm,
- 오메? 진짜 PPO 씀
- continuous state space
- continuous action space
- stable learning
- model free
- actor critic
RL Tuning
- hyperparameter tuning
- reward tuning
하이퍼 파라미터와 보상함수가 서로 영향을 미친다는 사실이 중요함
그르므로 튜닝을 위한 실험을 나눠서 진행하는 것이 agent의 최고 성능으로 바로 이어지지는 않음
- 그러나 보상의 매개 변수를 바꾸면 보상의 정의에 따라 총 보상을 직접 비교하기가 어려워지고, 하이퍼파라미터의 튜닝 실험은 조정해야할 매개변수가 많아질수록 계산 비용이 기하급수적으로 올라감. 따라서 분리해서 하면 시간 소모가 줄어듬
- 또한 환경이 극적으로 변화하지 않았기 때문에 다른 보상함수를 사용하더라도 비슷한 매개변수가 최상의 결과를 가져올 것
Hyperparameter Tuning
- 하이퍼 파라미터 튜닝은 ML 알고리즘의 성능 향상을 위해 쓰이는 흔한 선택임. learning rate나 네트워크 구조를 바꾸는 것이 일반적
- 그러나 RL 알고리즘에서는 하이퍼 파라미터 튜닝이 그렇게 흔한 방법은 아님. 왜냐하면 환경이 다이나믹하기 때문에 더 도전에 가까운 일이 되기 때문...
- 최신 연구에서는 하이퍼 파라미터 튜닝을 수행하는 것이 인상적으로 성능을 향상된다고 말함
하이퍼 파라미터 튜닝을 위해 선택해야할 것들
- 무슨 파라미터를 튜닝할 것인가
- 튜닝할 범위는 어떻게 되는가
- 매개변수 구성을 위해 어떤 샘플러를 사용할 것인가
Hyperparameter selection
- PPO에서는 네트워크 아키텍처 부분에서 사용되는 layer와 노드 개수
Sampler selection
- 하이퍼 파라미터 튜닝에는 계산 비용이 많이 드므로 효과적인 샘플러를 찾는 것이 중요함
- 이 논문에서는 Tree-structured Parzen Estimator sampler를 사용함(TPE)
- Bayesian Sampler의 일종임. 큰 하이퍼 파라미터 공간에 유용하고 pseudo-random samplers의 시스템 탐색에 이점을 가지고 있고, 중간 결과에도 적용할 수 있음
Experiment outline
- Energy plus 환경에서 10개의 episode가 진행될 때마다 서로 다른 hyperparameter 설정을 사용함
- 그리고 training controller가 validation을 진행하고 성능을 비교
Reward Tuning
- reward tuning은 최적화 문제이지만 일반적인 최적화 문제는 아님
- 최종 문제는 $p^{HVAC}$ 로 표현되는 에너지 소비전력 최소화이고, 동시에 제약 조건 위반 횟수를 최소화하는 방향으로 조정하는 것임
- multi-objective, uncontrained minimization problem
$$min_{\alpha \subset A} (p^{HVAC}(\alpha), f_{T_{SP}^{AL1}}(\alpha), f_{T_{constr}^{AL2}}(\alpha), f_{a_{fluct}}(\alpha))$$- $\alpha$ 는 reward tuning hyperparameter의 벡터(hyperparameters space의 element)
- $p^{HVAC}(\alpha)$ 는 연간 HVAC 전력량
- $f_{x}(\alpha)$ 는 1년간 제약조건 위반 혹은 바람직하지 않은 행동의 심각도 함수
- 이 세 가지의 함수는 서로 다른 세 타입의 패널티에 기초함
- 이걸 정의하는 것에 집중하고, 하이퍼 파라미터 영역에서 sampling하는 것을 이후에 논의
제약 조건 위반 행렬
- 에이전트의 성능을 평가하기 위해서는 3가지 타입의 원하지 않는 타입의 심각도에 대해 알아야함
- AL1 지점에서 설정값과의 편차
- AL2 지점에서 온도 제약 조건 위반
- action variables의 변동
- 이 각각의 효과의 심각도는 유클리드 거리 혹은 L2 norm으로 계산
$$||x||{2} = \sqrt{ \sum^{T}{t=1} x^{2}_{t} }$$
- $T$ = 일 년의 timestep 개수
- $x_{t}$ = 각각의 unwanted effect의 측정값
- 이 정규화는 작은 위반에도 패널티를 주면서, 큰 제약 조건 위반에 더 가중을 둠.
- $L_{2}$ norm 다음에 $L_{\infty}$ norm(연간 가장 큰 $x_{t}$)을 분석 목적으로 logging함
- 우선은 온도가 목표 지점보다 온도가 높을 때나 낮을 때나 $T^{AL1}$과 $T_{SP}^{AL1}$의 편차는 최소화되어야함
$$f_{T_{SP}^{AL1}}(\alpha) = \sqrt{ \sum_{t=1}^{T}(T_{t}^{AL1} - T_{SP}^{AL1})^2 }$$ - $T_{constr}^{AL2}$의 위반 사항의 경우에는 $T^{AL2}$가 제약(constraint) 온도보다 얼마나 높은지만 고려되어야함
$$f_{T_{constr}^{AL2}}(\alpha) = \sqrt{ \sum_{t=1}^{T}(max(0, T_{constr}^{AL2} - T_{t}^{AL2}))^2 }$$ - action의 변동에 관해서 agent는 큰, 고주파 oscillations을 가져서는 안됨. 그러므로 이전과 현재의 action 값의 차이를 반영
$$f_{a_{fluct}}(\alpha) = \sqrt{ \sum_{t=1}^{T}(a_{t} - a_{t-1})^2}$$
sampler section
- Bayesian TPE Sampler를 사용
- 보상함수의 hyperparameter space도 고차원이고 다중 목표 최적화에 있어서는 중간 결과 조정이 더 합리적
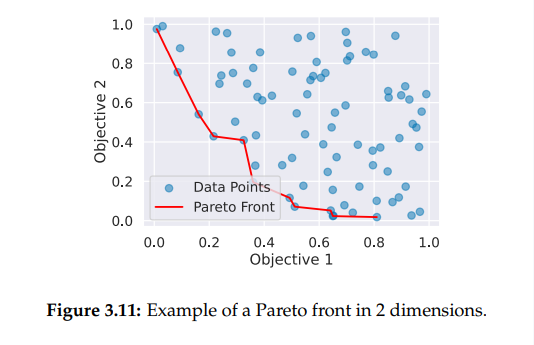
- sampler가 더 나은 보상으로 이끌기 위해 hyperparameter를 추출하는 단일 목표 최적화와는 다르게 다중 목표 TPE는 Pareto front라고 불리는 곳에서 hyperparameter를 추출하려고 한다
- Pareto front(pareto frontier, pareto curve) : multi-objective optimization 기법. 최적의 설계해들은 곡선, 곡면, 초곡면 등을 이루게 되어 이를 파레토 최적해 표면이라고 부름
- 이 front는 모두 non-dominated solution으로 구성됨.
- 모든 최적화 metrics에서 첫 번째 구성을 능가는 다른 구성이 없는 방향으로 행동을 이끈다면 구성은 비 지배적이다.

Experiment outline
- reward tuning 실험의 목표는 4개의 성능 지표를 pareto front 형태로 만드는 것
- 이를 달성하기 위해서 agent는 서로 다른 하이퍼 파라미터 구성을 200회 학습함
- 이 구성들은 TPE Sampler로부터 추출됨
- 각각의 구성은 훈련 방해 데이터로 10 episode간 다시 학습하고 검증 방해 데이터로 평가됨
- 하이퍼 파라미터 튜닝 실험을 통해 찾은 알고리즘 하이퍼 파라미터는 모든 보상 구성에 사용됨
- 보상 튜닝 실험은 baseline conbbroller의 성능을 비교함
728x90